 English | EN
English | EN 
Introduction
Indoor location services are multiplying in response to a sharp increase in demand and the inefficiency of the indoor GPS system. The technical means implemented to respond to this issue are numerous but require the implementation of specific infrastructure.
In response to this issue, Sogeti has focused on the analysis of magnetic fluxes, and more precisely on the magnetic anomalies generated by modern buildings architectures.
The advantages of such an operation are numerous: non-existent costs (no hardware installation required), potentially increased accuracy, usable on all peripherals equipped with a magnetometer (almost all mobile phones and tablets).
The business perspectives are many and varied. For our tests, we chose to develop an application for new recruits: Linkindoor. This application combined with social network type functionalities and time slots availabilities, allows them to meet their colleagues and managers located in different parts of our buildings, a guarantee of good integration!
Implementation process
Our research has led us to evaluate different models and solutions allowing us to locate ourselves from points of interest or markers in an interior space with a mobile phone and only by exploiting natural magnetism.
In this perspective, several algorithms have been developed, some of them exploiting artificial intelligence, and a first user interface has been implemented. The principle adopted is the constant measurement of the magnetic field during the user’s movement and the search for correspondences with the anomalies recorded during the mapping. The first tests carried out highlighted various problems: high number of false positives, latency, device tilt effect.
We therefore completed our research by trying to exploit the other sensors of the phone, but above all by trying to form discriminating groups of anomalies. This last point allowed us to obtain first encouraging results, but with very precise conditions of use (e.g. mapping and localization with the same device, identical orientation and trajectory).
First tests
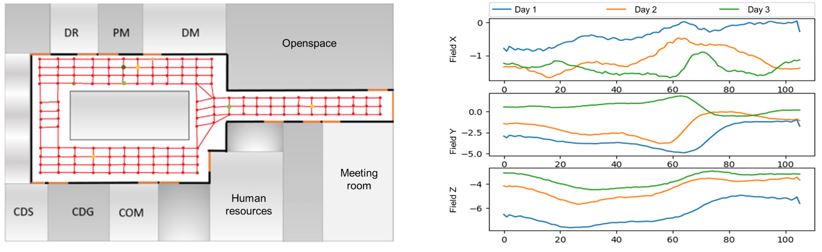
Through extensive real-world testing, we were able to determine that since data varies from day to day, a model that works very well one day may not be as effective the next.
Expanding the input data based on a large number of points instead of a few references did not yield significant results. The predictions obtained are little or not at all accurate, making localization impossible in this way.
We then tried to limit the variation of magnetic fields at the device by placing it in a fixed position, such as on a moving robot.
Despite this, the variations are significant from one day to the next, due to various disturbing factors, for which we have not found an adequate solution.
Conclusion
Our good old planet, due to the influence of its natural satellite, is difficult to domesticate!
Nevertheless, we are certain that the work carried out has made it possible to clear up this fascinating and interesting subject, and that a new team will be able to exploit it in the near future.
This blog has been co-authored by Olivier Tarroux