 English | EN
English | EN 
Nowadays, real-world applications are becoming increasingly complex, characterized by numerous components, open and dynamic environments, and diverse interactions between components, which lead to a large number of unpredictable situations. Traditional information modeling approaches that aim to centrally control and analyze all potential system situations are no longer suitable for addressing complex problems. Therefore, a paradigm shift is leading toward a modeling approach that can address multiple dimensions of complexity, including highly specialized expertise, suitability for large-scale applications, heterogeneous and decentralized modeling, and self-organization and self-adaptation. Such an approach is now known as Multi-Agent Systems (MAS).
Multi-Agent Systems
An agent is situated in some environment and that is capable of autonomous action in this environment to reach its goal. Agents are highlighted by the following characteristics: autonomous, having local skills and goals, having partial representation of environment, and being able to interact with the environment and other agents.
An agent performs a continuous lifecycle including three steps: perception, decision, and action. In the first step, agents perceive new information coming from their environment. In the decision step, agents choose the action depending on their perceptions of the environment. In the last step, agents perform the selected action in the previous step and modify the local part of their environment where they are situated.
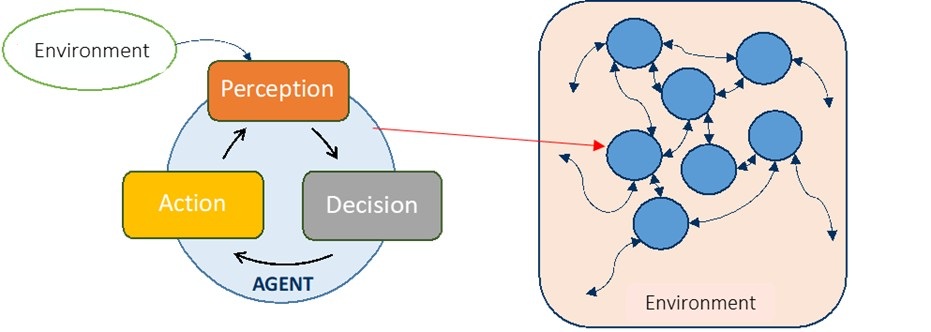
An MAS is composed of a set of interacting agents. Each of them has its individual objective, knowledge, and skills. They interact with each other to reach their own local goals. These interactions result in the global goal of MAS.
What makes MAS different? Adaptive MAS and Emergence Phenomena
Inspirations

In nature, systems such as bird flocks, fish schools, and insect swarms demonstrate how large groups can form coordinated patterns without any central leader. Each individual follows simple local rules, such as maintaining distance, aligning direction, or moving toward neighbors, which leads to complex patterns at the global level. This phenomenon is known as emergence, where a complex pattern or function at the global level of a system arises from autonomous and simple interactions among lower-level components, or agents. Similarly, in MAS, autonomous agents interact locally with each other and with their environment, and through these interactions, the system self-organizes into structured, adaptive, and intelligent global behavior. This nature-inspired principle is fundamental to MAS and explains why this approach is effective for dealing with complex problems such as swarm robotics and distributed artificial intelligence.
Emergent Behaviors in MAS
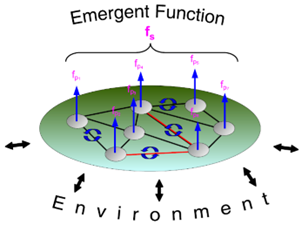
Emergent behaviors in MAS occur when the overall system function arises from the interactions of many individual agents operating within a shared environment. Each agent acts autonomously, following its own local decision rules and interacting with other agents and the environment rather than receiving instructions from a central controller. Self-organization and self-adaptation are the key mechanisms that lead to these emergent behaviors.
The important question then becomes: how can we ensure that the emergent function aligns with the expected system goal? In practice, emergence cannot be directly controlled, and controlling it is not the objective. System designers do not have full visibility over how global behavior will emerge. Instead, their focus remains at the agent level, where they must define three main elements: first, the types of agents in the system; second, the agents’ goals, skills, and decision rules; and third, the way agents interact with others in cooperative behaviors. Cooperative behavior is the key factor in guiding the system toward an appropriate emergent function that satisfies the global system objectives, as proven in theory [1]. System designers, by understanding the expected goals, need to ensure the relevance of these three elements; if they are well defined, the expected goal will emerge from the cooperative behaviors of the agents. Furthermore, appropriate emergence can also lead to intelligent behaviors and system functions that go beyond what was initially anticipated or expected, producing innovative and adaptive solutions that were not explicitly designed at the beginning.
An Application Case: Dynamic Task and Role Adaptation in Multi-Agent Large Language Models
In the application of Large Language Models (LLMs) and generative AI, there remains a significant challenge related to task and role adaptation. Traditional approaches typically define tasks and roles in advance and assign them to specialized agents. However, complex environments and continuous interaction with humans create a wide variety of tasks and agent profiles that cannot all be predefined. This makes static role assignment inefficient and inflexible in dynamic contexts.
In this context, three key characteristics of MAS: autonomy, self-organization, and self-adaptation help address these challenges [2]. MAS can adapt to dynamic tasks and evolving environments while also supporting a dynamic profile mechanism that defines and continuously evolves each agent’s roles, capabilities, and expertise based on interactions and task demands, without centralized control. Through the emergence of cooperative behaviors among agents, the system can develop an adaptive task allocation and role distribution without the need to predefine every role or task, making the system more flexible, scalable, and resilient.
References
[1] Capera, Davy, et al. “The AMAS theory for complex problem solving based on self-organizing cooperative agents.” WET ICE 2003. Proceedings. Twelfth IEEE International Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises, 2003. IEEE, 2003.
[2] Lu, Siyuan, et al. “Morphagent: Empowering agents through self-evolving profiles and decentralized collaboration.” arXiv preprint arXiv:2410.15048 (2024).
Acknowledgement
The images featured in this blog are from presentations prepared by the SMAC teams at IRIT (Institut de Recherche en Informatique de Toulouse). Their research and presentation materials provided valuable visual support for explaining several of the concepts discussed here. I would like to acknowledge and thank the SMAC teams at IRIT for making these materials available and for their contributions to the research community.